WELCOME TO
Advanced IC Engineering, Inc
Hardware and Software Engineering Services
Updated May 2024
We do not provide service or products to New York State.
PRODUCTS & SERVICES
Advice provides hardware and software solutions in many packages. We have a very strong background in communications, digital and analog design. We cover both embedded and system software.
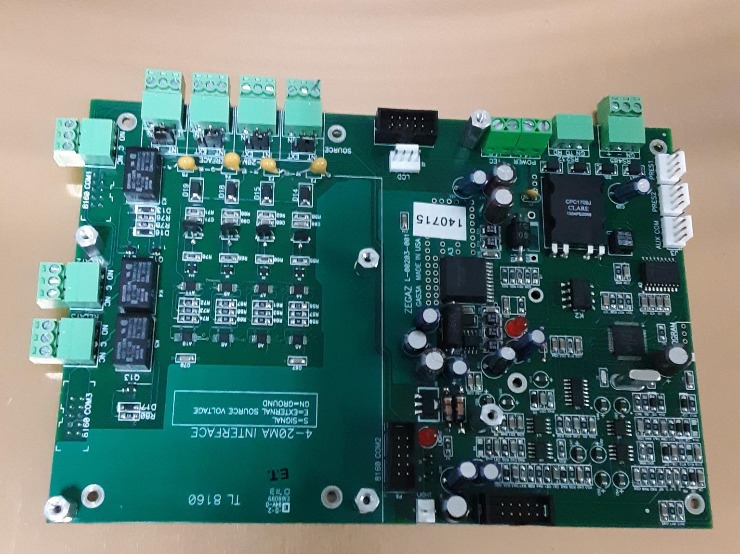
Example of one of our system designs
This product was designed for Zegaz Insturments to work with their Hydrocarbon Dewpoint Analysis System (HCD-5000). It couples to a microcomputer provides RS232, RS485, 4-20mA, Modbus, TCPIP GUI, User Relays as well as operate the patented dewpoint cell.
CONTACT US
Call or email us with any questions you may have.
We receive a lot of email and it is easy to get filtered out, so place in the subject line "Inquiry or RFQ"
410-259-9941
info@advice1.com
Projects@advice1.com
If you have a potential project send the files to this address and give us a call at
410-259-9941.